*The image above is of SCR3160CSN-300-CM and the video shows SCR3160CS-300-PM.
Characteristics
Path planning handling has joined the lineup of clean robot with the closed-loop control.
Access to the chamber stage arranged in parallel without a track improves the flexibility in the layout design and the cost-performance.
*Click to go to the page of the path planning handling video.
New type of 3-axis cylindrical coordinate type single-arm clean robot
For handling wafers from 2 inch to 300mm with low-cost, high-speed handling, and no step-out error
High reliability: Closed-loop control achieves no step-out error under rapid load change or acceleration.
Reduced origin search time: By absolute encoder
Equipped with the batteryless multi-rotation absolute sensor
Robot replacement is available: Compatible with conventional model (installation/performance)
High rigidity: Payload capacity of 3kg (calculated for the arm 3rd joint/including wrist-block, end-effector, and wafer)
Arm lineup: 100mm, 130mm, 160mm, 200mm
Base or flange mounting type is selectable according to the customer’s system layout.
Bernoulli end-effector is available (option)
Standard Specifications
Example of specifications with JEL standard end-effector (vacuum type)
Specifications of Robot
Robot Model
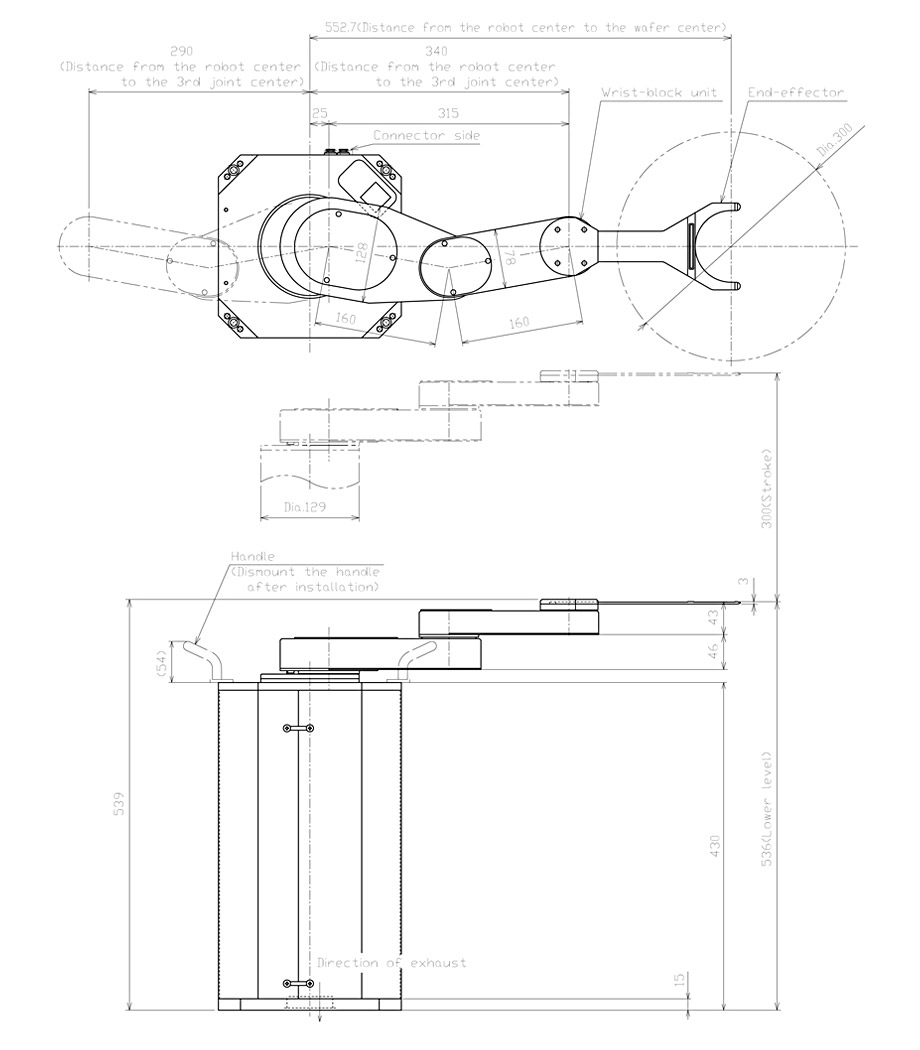
SCR3160CSN-300-CM
Carrying Object
Wafer up to 300mm (Available for various types of wafers)
Wafer Holding Method
By vacuum suction
Robot Model Type
Cylindrical coordinate type
Control Axis
3-axis
Motor Type
Stepping motor (Closed-loop)
Operating Range
From the robot center to the wafer center
Rotation Angle (Theta-axis)
Vertical Stroke (Z-axis)
552.7mm
340deg
300mm
Carrying Speed (Ave.)
Arm (R-axis)
Rotation Angle (Theta-axis)
Vertical Stroke (Z-axis)
610mm/sec
340deg/sec
250mm/sec
Carrying Speed (Max.)
Arm (R-axis)
Rotation Angle (Theta-axis)
Vertical Stroke (Z-axis)
1220mm/sec
500deg/sec
320mm/sec
Resolution
Arm (R-axis)
Rotation Angle (Theta-axis)
Vertical Stroke (Z-axis)
Below 10.0µm
0.0015deg
2.0µm
Repeatability
Within ±0.1mm
Cleanliness
ISO Class 2 (at wafer transfer level when exhausting driving part)
*The table above shows the specifications of JEL standard wrist-block units. The other specifications are available.
*Click the items below to review the wrist-block units other than JEL standard types.
*The table above shows the specifications of JEL standard end-effectors. The other specifications are available.
*Click the items below to review the end-effectors other than JEL standard types.
*The operating range in the table that is specified by the combination of the wrist-block unit and end-effector is an example only. The other combinations are available.