Robot for Semiconductor
JCR4400 (Transfer Robot with Auto alignment for PLP)

|
Usage Environment/SpecificationsProduct Profile
|
List of Product Model
| Product Model & Vertical Stroke | |||
|---|---|---|---|
| JCR4400-400-AM | 400mm | ||
Product Video
- The image above and the video are of JCR4400-400-AM (Transfer Robot with Auto alignment for PLP).
Characteristics
4-axis horizontal and multi-joint type clean robot with auto alignment for PLP.
- Suitable for access to the parallel layout
- Transfer with high accuracy by non-contact alignment
- Maximum payload capacity of 10 kg
Standard Specifications
| Specifications of Robot | ||||
|---|---|---|---|---|
| Robot Model | JCR4400-400-AM | |||
| Carrying Object | Substrate 500 mm x 500 mm | |||
| Substrate Holding Method | By vacuum suction with end-effector | |||
| Robot Model Type | Horizontal and multi-joint type | Control Axis | 4-axis | |
| Motor Type | AC servo motor | |||
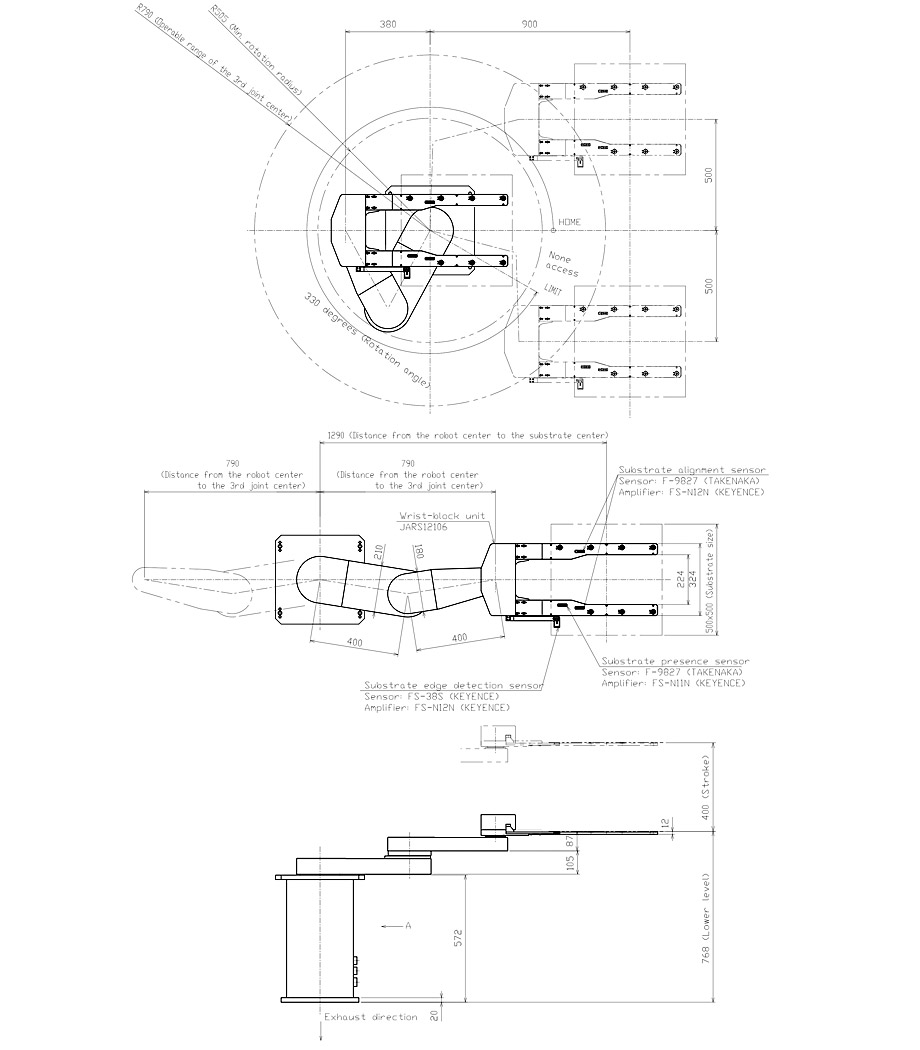
| Operating Range | From robot center to wafer center | Rotation Angle (Theta-axis) | Vertical Stroke (Z-axis) | |
| 1290 mm | 330 deg | 400 mm | ||
| Carrying Speed | Arm (R-axis) | Rotation Angle (Theta-axis) | Vertical Stroke (Z-axis) | |
| 1170 mm/1.6 sec | 330 deg/1.5 sec | 400 mm/1.4 sec | ||
| Resolution | 1st Joint Axis (J1 axis) | 2nd Joint Axis (J2 axis) | 3rd Joint Axis (J3 axis) | |
| 3.5x10-3 deg | 1.8x10-3 deg | 1.8x10-3 deg | ||
| Z-axis (J4 axis) | ||||
| 2.4x10-3 deg | ||||
| Repeatability | Within ±0.2 mm | |||
| Cleanliness | Robot main body: 0.3 µm/cf Class 10 (when exhausting driving area) | |||
| Utility |
Power: AC200V Single phase ±10% 4 kVA Vacuum: -53 kPa or more |
|||
| Mass | Robot main body: Approx. 120 kg | |||
| Specifications of Controller | ||||
| Controller Model | C5000S series | |||
| Interface | RS232C and parallel photo I/O | |||
| Outline Drawing (Standard) |
|---|
|
Icon guide
- ...Atmosphere
- ...Vacuum
- ...Waterproof
- ...Single arm
- ...Twin arm
- ...Thin wafer
- ...CE marking
- ...JEL's standard spec.
- ...KCs marking